
Posts
Aligator v0.12.0 delivers cleaner integration and expanded compatibility for robotics optimization and trajectory planning: refreshed CMake with Gersemi sync, improved Pinocchio handling and domain-error macros, and a new collision residual. v0.12.0 aligns with Crocoddyl 3.0.1 and replaces Boost pointers with standard smart pointers for a cleaner, more maintainable codebase.
Maestro
ProxSuite 0.7.2 boosts portability and code quality across C++ and Python. The release adopts Gersemi and Ruff and updates nanobind, improving maintainability and developer efficiency for high‑performance quadratic and linear programming.
Maestro
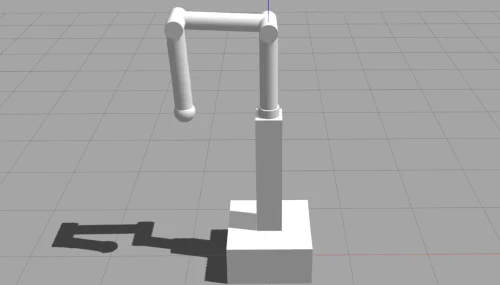
Pinocchio 3.4.0 delivers focused upgrades to MJCF and developer tooling: vertex-based mesh parsing, default xyz Euler-angle interpretation, resilient qpos keyframe parsing across newlines, and precise site reading.
Maestro

Discover how the Pinocchio software and Maestro initiative are revolutionizing AI-driven robotics at the AI Action Summit Business Day 2025 at Station F, Paris.
Maestro

Inria has published an article highlighting the Maestro consortium, an initiative dedicated to advancing robotics through differentiable control architectures and AI-driven optimization. This recognition underscores Maestro’s mission to develop open-source tools like Pinocchio and foster collaboration between research and industry.
Maestro
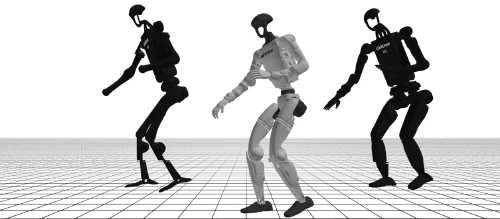
Unitree Robotics is excited to announce the release of the LAFAN1_Retargeting_Dataset, an open-source dataset designed to make humanoid robot movements more natural and fluid. And it's powered by Pinocchio.
UniTree
Justin Carpentier Unveils Vision for Differentiable Control Architectures at Humanoids 2024 Keynote.
Maestro

Real-Time MPC Controller Demonstration on Quadruped Robot Using MAESTRO Software Stack at Humanoids 2024.
Maestro
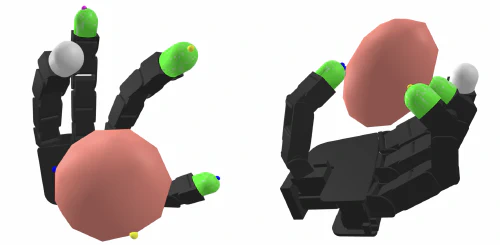
COAL 3.0 (formerly HPP-FCL) Robust and Fast Collision Detection and Contact Surface Computation.
Maestro